 |
 |
HOME
SENSORES REMOTOS
FOTOGRAMETRIA
INVESTIGACION
SOFTWARE
ORIENTACIÓN INTERIOR DE CAMARAS FOTOGRAFICAS METRICAS
La Fotogrametría tiene por objeto la representación en planimetría y altimetría de un terreno o de un objeto por medio de fotografías de estos convenientemente obtenidas.
Prescindiendo de la deformación producida por el objetivo fotográfico, puede decirse que las imágenes fotográficas son proyecciones centrales del terreno (o escena) sobre el plano-imagen de la cámara, siendo el centro de proyección el punto nodal posterior del objetivo.
Supongamos la placa donde se forma la imagen en posición vertical (ejemplo de proyección central), y sea O el centro de proyección o punto de vista; los rayos principales procedentes de dos puntos cualesquiera P1 y P2 del terreno, cortan al plano-imagen en p1 y p2 de modo que estas son respectivamente las imágenes de aquellos.
Para la interpretación de la imagen hay que conocer la proyección del punto O sobre el plano-imagen, es decir, el punto principal H, así como la distancia focal principal OH. La intersección AB del plano horizontal que pasa por O con el plano-imagen se llama línea de horizonte. Proyectando los dos puntos p1 y p 2, sobre la línea de horizonte, se tiene que el ángulo a es el ángulo acimutal correspondiente a los dos puntos del terreno P1 y P2, y los ángulos b1 y b2 son respectivamente los ángulos de altura de P1 y P2 (de signo contrario).
Es decir, que con una fotografía a la vista se pueden determinar, conociendo el punto principal, la línea de horizonte y la distancia focal principal, los ángulos acimutales entre puntos cualesquiera del terreno, y también los ángulos de altura que corresponden a estos mismos puntos. Con una fotografía de esta clase se tienen los acimut y ángulos de inclinación de todos los puntos del terreno representados en aquella y correspondientes al punto O como estación.
En conclusión una vista fotográfica puede llamarse fotograma si se conocen los elementos de su orientación interior.
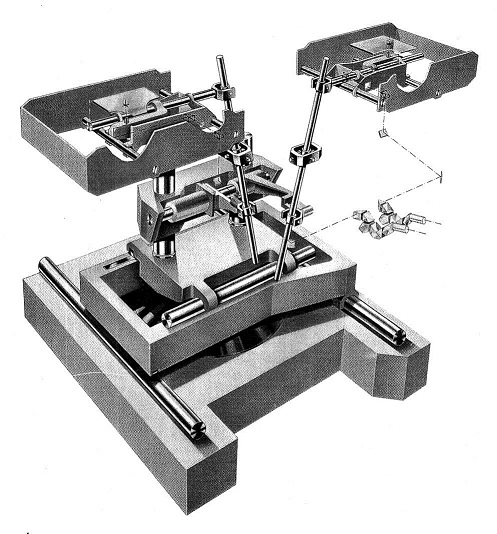
Como en los trabajos fotogramétricos siempre se trata de distancias grandes, no hay que variar la posición de la placa para lograr el enfoque, y por consiguiente, se pueden emplear cámaras rígidas, cuya distancia focal principal será igual a la distancia focal del objetivo. El chasis que lleva la placa sensible, y que constituye el fondo de la cámara, también lleva unos dispositivos que permiten en el momento de la toma impresionar las marcas fiduciales. Las rectas que unen estas marcas dan en su intersección el centro del fotograma y por consiguiente el punto principal (sí H coincide con esa intersección). A la recta de unión de este punto principal H con el centro de perspectiva, que es el punto nodal posterior del objetivo, le llamaremos eje de la cámara.
Resumiendo:Centro del fotograma: es la intersección de las rectas que unen las marcas fiduciales (origen del sistema de coordenadas de la imagen).
Punto principal: es el pie de la perpendicular bajada desde el centro de proyección al plano-imagen.
Distancia focal principal:es la longitud de la recta perpendicular bajada desde el centro de proyección al plano-imagen.
Línea de horizonte: es la intersección del plano horizontal que pasa por O {centro de perspectiva) con el plano-imagen.
Si la cámara fotogramétrica esta debidamente ajustada el centro del fotograma y el punto principal deben coincidir. Además cuando el objetivo de la cámara no ha sufrido golpes o deformaciones la distancia focal indicada por el fabricante en el cuerpo de la cámara es casi igual a la verdadera que tiene esta
La determinación de los parametros de Orientación Interior de una cámara (calibración), puede realizarse por métodos clásicos para las cámaras métricas analógicas y digitales o por métodos de computacién gráfica para las cámaras digitales no métricas. Calibración de cámaras no métricas
ORIENTACIÓN EXTERIOR
Sabemos que una manera de lograr una buena reconstrucción tridimensional de un objeto en el espacio es mediante el empleo de dos fotografías del objeto tomadas desde puntos de vistan diferente (estereofotogrametria). Se trata entonces de un problema de intersección en el espacio donde cada punto del objeto esta determinado por un par de rayos que salen desde los centros de proyección y se cortan en dicho punto.
Con la orientación interior de un fotograma conseguimos conocer perfectamente la posición del centro de proyección con respecto a un sistema de coordenadas situado en la misma placa:
f = OH
OI -->
O => H {x, z} o {x, y}
En este caso estamos hablando de tres grados de libertad.
Pero para poder reconstruir un objeto situado en el espacio a partir de su perspectiva fotográfica también se necesita conocer la posición de ese fotograma en el espacio esto es la Orientación Exterior.
Como todo cuerpo en el espacio tiene seis grados de libertad la cámara fotográfica y por ende su centro de proyección y plano focal también tendrán seis grados de libertad. Se considera todos los puntos del terreno y también la cámara referido a un sistema de coordenadas cartesiano ortogonal de tres ejes: X, Y, Z.
Posición del centro de toma en el espacio: O = ( Xo, Yo, Zo )
Posición del eje óptico en el espacio:
o’, O, o1 = definida por dos parámetros angulares (e, q), en el sistema X, Y, Z
e = inclinación del eje de toma (o’, O, o1), con respecto al plano XY
q = Ángulo de dirección que forma la proyección del eje de toma (o’, O, o1), sobre el plano XY, con respecto a uno de los ejes Xo o Yo.
k = Rotación de la cámara alrededor del eje de toma: El giro k, es el ángulo que forma la recta i intersección de un plano p paralelo al plano XY de referencia con el plano de la placa y el eje x, perteneciente al sistema local de referencia de la placa (x, z).
Entonces tenemos seis parámetros para definir la Orientación Exterior de una perspectiva, tres traslaciones y tres giros y para determinar completamente una perspectiva serán necesarios nueve parámetros puesto que hay que considerar los tres parámetros de la Orientación Interior.
Como para definir correctamente un punto en el espacio necesitamos realizar un proceso de intersección de perspectivas (dos fotogramas), serán necesarios entonces doce parámetros de Orientación Exterior.
Los doce parámetros de Orientación Exterior se dividen en cinco parámetros de Orientación Relativa y Siete de Orientación Absoluta.
Orientación Relativa
Se trata que los rayos homólogos de los haces espaciales de ambos fotogramas se corten dos a dos. La geometría proyectiva demuestra que si cinco pares de rayos homólogos (de dos fotogramas), se cortan dos a dos, se cortaran también los infinitos pares de rayos de los puntos homólogos que determinan un objeto en el espacio.
El teorema de Terrero-Hauck establece desde el punto de vista geométrico cuales serán los cinco elementos que resolverán la Orientación Relativa.

PN = plano nuclear
EN = eje nuclear
r = rayo nuclear
t = punto nuclear
Elementos de la Orientación Relativa:
F', F" = ángulos de oblicuidad entre los ejes ópticos y el eje nuclear
k', k" = ángulos de rotación marginal
g = ángulo entre las placas
Todo haz de rayos nucleares generados por puntos del terreno pasaran por el punto nuclear y se cortaran dos a dos en la recta S.
Orientación Absoluta
Se trata de la posición del modelo con respecto al sistema de coordenadas XY.
Tendremos entonces un parámetro factor de escala y seis parámetros definidos por tres traslaciones y tres rotaciones.
Estos parámetros se obtienen de las coordenadas planimétrica y altimétrica de dos puntos del terreno y la coordenada altimétrica de un tercer punto del terreno. Estos puntos A,B,C, se denominan puntos de apoyo fotogramétrico (PAF), que conjuntamente con otros puntos de control permiten la resolución completa del modelo.
A = (xa, ya, za)
B = (xb, yb, zb)
Z = zc
Fotogrametría Terrestre
Una de las primeras aplicaciones de la fotogrametría fue sin duda la fotogrametría terrestre hoy derivada en fotogrametría de objetos próximos.
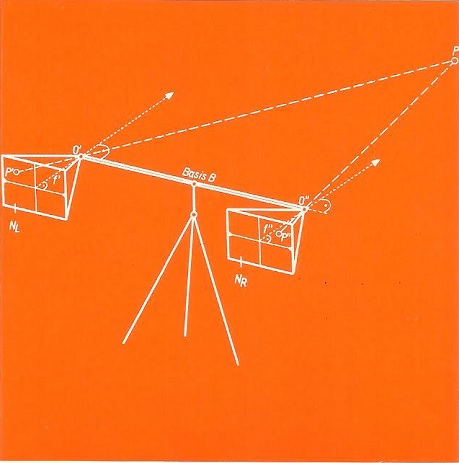
Si se toman en el terreno dos vistas fotográficas, con las placas verticales y a igual altura sobre el suelo, pero separadas una cierta distancia entre sí, las fotografías obtenidas tienen propiedades estereoscópicas, es decir, que si se colocan las positivas correspondientes en un estereoscopio, se ve en relieve la parte del terreno fotografiada.
Originalmente la fotogrametría terrestre era muy utilizada en levantamientos topográficos con el objeto de obtener la representación planialtimetrica del terreno a escalas grandes (1:500, 1:1000). En general se aplica en el estudio previo al emplazamiento de obras de ingeniería. En la actualidad se ha encontrado un nuevo uso a esta técnica, principalmente en la conservación de obras de arquitectura y el resguardo de monumentos históricos, pero también se presta eficientemente para el estudio de deformaciones de cuerpos sólidos y ensayos dinámicos en la industria aeronáutica y automotriz.

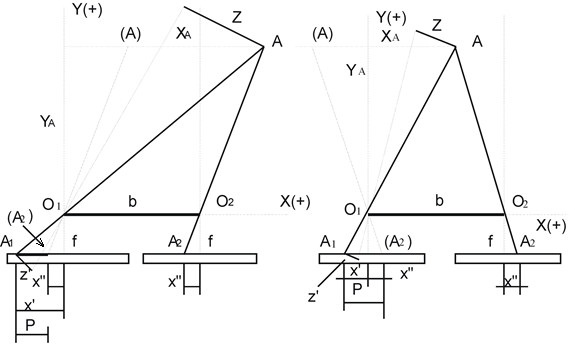
En la fotogrametría terrestre la cámara fotogrametrica se encuentra apoyada sobre el terreno, y en el Caso Normal, los ejes de la cámara (o cámaras) son horizontales, paralelos entre sí y perpendiculares a la base
Metodología
El procedimiento del levantamiento estereofotogramétrico terrestre, como todo trabajo de relevamiento, tiene como una de las primeras tareas el reconocimiento previo de la zona, siendo a su vez el principal problema del reconocimiento el de la elección y ubicación de la base.
Se hace necesario tomar puntos de control bien señalizados en el terreno con el objeto de identificarlos fácilmente en el fotograma y se determinan sus coordenadas topográficas por cualquier método de la geometría practica. Generalmente se eligen cuatro puntos en la zona de superposición estereoscópica, tres cerca del Ymax {máxima distancia a relevar) y uno cerca del Ymin (mínimo alejamiento de objetos a la cámara). Las coordenadas X, Y, Z de cada uno de estos puntos, obtenidas por un método topográfico, deberían coincidir con las que se obtengan a partir de los valores medidos en el instrumento de restitución.
Procedimiento para calcular X, Y, Z

Relevamiento terrestre Láser
Una nueva tecnología se apresta a sustituir, quizás en el corto plazo, al clásico método de relevamiento estereofotogrametrico terrestre. Las cámaras fotográficas métricas que emplean film o las cámaras métricas digitales, pueden ser remplazados por un sistema de sensor remoto que genera un modelo digital del terreno en tiempo real sin requerir de complejos equipos y procedimientos de restitución. Este sistema que ya ha sido probado con éxito para relevamientos aéreos consiste en un barredor láser que produce coordenadas 3D de cada punto de terreno o de una estructura en particular. Tal vez podría establecerse una discusión en cuanto a la precisa resolución que se puede conseguir con este método para diversas distancias a los objetos a relevar pero es evidente que el sistema tiene ventajas sobre la fotogrametría terrestre tradicional. De todas formas una imagen sigue siendo mas expresiva que una nube de puntos por lo que la combinación de ambos métodos permite obtener buenos resultados.
Fundamentos Geométricos de la Toma de Fotografías Aéreas Verticales
Un vuelo fotogramétrico generalmente se realiza cubriendo la superficie del terreno con fajas longitudinales de fotografías tomadas a una cierta altura del mismo. Normalmente se realiza el recubrimiento longitudinal con una superposición de fotogramas del 60% lo que permitirá luego una buena formación del modelo estereoscópico facilitando de esta manera una mejor identificación de los detalles del terreno. Para evitar que puedan quedar zonas de la superficie del terreno sin fotografiar al realizar un cambio de faja, se realiza una superposición transversal entre las mismas del 30%.
La figura representa los elementos geométricos ideales de un vuelo fotogramétrico con eje de toma vertical.
Los parámetros como la altura de vuelo sobre el terreno, la base aero-fotogrametrica, el avance lateral, etc., están fijados principalmente por la escala con la que necesitamos resulten los fotogramas. Lógicamente el tipo de cámara es un factor que interviene directamente en la primera etapa de los cálculos.
EF = f / h donde f = distancia focal de la cámara
h = altura de vuelo sobre el terreno
Es evidente que la realidad de un vuelo fotogramétrico normalmente es bien distinta de las condiciones ideales que se establecen en la teoría. Principalmente esto se manifiesta en el hecho de que es muy difícil mantener el eje de la cámara absolutamente vertical en el momento de la toma y que por otra parte el terreno presenta accidentes geográficos. Para el primer caso se establecen ciertos limites en la inclinación del eje de toma de tal forma que luego mediante procesos adecuados puedan compensarse de alguna manera las deformaciones producidas en las imágenes. En cuanto a los desniveles del terreno el problema que plantea es el de la uniformidad de la escala, lo cual nos lleva a considerar ahora una escala media de los fotogramas obtenidos. Además de esto para conseguir una correcta restitución se debe trabajar con procedimientos complejos tendientes a disminuir la influencia de las deformaciones con el objeto de asegurar las precisiones requeridas.
FOTOGRAMETRIA DIGITAL
Desarrollo de la Fotogrametría
La evolución de la Fotogrametría está en relación directa con el avance tecnológico en los instrumentos de restitución. Los restituidores analógicos de la primera etapa tenían un funcionamiento óptico mecánico de gran precisión pero de baja eficiencia y productividad. Se trabajaba directamente con las imágenes fotográficas positivas o negativos y las coordenadas planimétricas y altimétricas se obtenían de escalas y contadores conectados a los husillos. Para operaciones que implicaban frecuentes lecturas de coordenadas se podía realizar una conexión a un sistema de adquisición de datos consistente en un dispositivo electrónico compuesto de tres codificadores incrementales acoplados a los husillos X, Y, Z. Esto era muy útil para la determinación de los puntos de paso para la aerotriangulación, en el registro de los mojones limites (bien identificados) de parcelas, en el catastro, en la restitución de perfiles altimétricos, etc. La eficiencia se evaluaba en función de la cantidad de cartas topográficas que era capaz de dibujar la mesa trazadora puesto que las funciones de operador y dibujante pueden acumularse en una sola persona.
Debido al aumento de la exigencia de los usuarios y a una transformación lógica y previsible de la tecnología, los instrumentos de restitución evolucionaron hacia los estereorrestituidores analíticos, tales instrumentos alcanzaron tal grado de desarrollo que se hace muy difícil establecer hoy una separación con la fotogrametría absolutamente digital. Algunos de los puntos a destacar de estos instrumentos analíticos son su técnica constructiva de vanguardia (hardware), su arquitectura modular, sus prestaciones elevadas, su precisión y su software adecuado. Fueron diseñados para la Cartografía en Línea, con una alta precisión cartográfica, algunos elementos a destacar son los siguientes:
- Soportes de imagen: película (film) negativos – diapositivas
- Salida grafica a la pantalla: revisión del mapa digital, pantalla interactiva
- Trazadoras de tambor
- Precisión de medición 2 mm
- Superposición de imágenes raster
- Orientación semiautomática del Modelo
- Medición automática de altitudes: modelos altimétricos digitales (sistema de Correlador)
- Ortofotos digitales
- Orientación del Modelo para imágenes de satélite SPOT
- Aerotriangulación: ajuste de bloques (PATH-M)

Estaciones Fotogramétricas Digitales
Las estaciones fotogramétricas digitales principalmente están compuestas por una computadora tipo PC y una serie de dispositivos especiales, que permiten realizar las mismas funciones de un restituidor analítico pero en forma totalmente digital. Los principios geométricos de coplanaridad de rayos siguen estando vigentes para las orientaciones pero ahora a través de algoritmos de imagen epipolar. Se reemplazan las imágenes sobre film (negativo o positivo) por archivos digitales de imágenes raster, para lo cual es necesario disponer de un escáner fotogramétrico de alta resolución. Generalmente los sistemas de visión estereoscópica se basan en el método de gafas activas LCD. La orientación del Modelo ahora es prácticamente automática y la gran cantidad de software disponible permite una actualización continua a bajo costo.
Los componentes básicos del hardware de un equipo de fotogrametría digital pueden apreciarse en la figura. Los periféricos de entrada generalmente son un escáner fotogramétrico, CD, DVD ROM, cinta magnética o memoria de estado sólido que contienen datos imagen digitales y una cámara digital de buenas condiciones métricas que entrega directamente datos imagen digital. Los periféricos envían datos imagen a la Unidad Central de Proceso (CPU) que actúa como una estación de trabajo, la CPU puede contar con un procesador Pentium I7 o de arquitectura paralela y algún sistema Windows NT, además debe poseer un disco rígido de gran capacidad de almacenamiento y memoria RAM suficiente como para mover sin inconvenientes la gran cantidad de datos bits que genera una imagen digital. Conjuntamente con esto el equipo debe ser capaz de emular las capacidades de un estereorrestituidor analítico, por tanto tiene que disponer de un sistema de visión estereoscópico así como manivelas X, Y, y pedal Z para efectuar fácilmente la restitución, además de las aplicaciones Zoom, Move, estilóptico con control de tamaño variable, etc. Los periféricos de salida generalmente son un Plotter o impresora, pantalla video y capas de archivos digitales (Layers) que son las vituallas de un sistema de información geográfico (SIG).
Un sistema como este, en general está compuesto por:
• Monitor(es) de vídeo
• Dispositivo de visión estereoscópica – Anteojos con control infrarrojo, monitores especiales de alta velocidad de refresco, etc.
• CPU gráfica, o placa de vídeo especial, placa aceleradora
• CPU general
• Periféricos de Entrada/Salida – Teclado, Mouse, scanner, mesa digitalizadora, plotter y/o impresora.
• Dispositivo de medición estereoscópica – Trackball, topo-mouse, etc.
• Módulos de software dedicado las operaciones fotogramétricas, tales como: Orientación interior, orientación relativa y orientación absoluta, u orientación exterior (relativa + absoluta simultáneamente), aerotriangulación (medición y cálculo), restitución, rectificación y remuestreo de imágenes (geometría epipolar), extracción de modelos digitales (DTM) del terreno, generación de orto-imagen, integración con sistemas de información geográfica, etc.
El patrón actual de monitores de vídeo para este tipo de aplicación se encuentra entre 19 e 22 pulgadas.

Productos que se obtienen con una Estación Fotogramétrica Digital
Procesamiento de imágenes
Generación automática de MDE (DTM)
Ortofotos
Mosaicos de ortofotos y de ortofotomapas
Vistas en perspectiva (cartografía 3D)
Vuelos simulados 2D/3D (Realidad Virtual)
Procesamiento sensores remotos
Ortofotos Reales = EDIFICIOS VERTICALES
Interpolación de Curvas de Nivel
Curvas + Ortofotos ORTOFOTOMAPAS
Algunas consideraciones sobre cámaras fotogramétricas aéreas digitales
En el campo de las cámaras aéreas para fotogrametría se está en los comienzos de una nueva era y es la utilización de cámaras digitales de alta resolución y precisión. Se indicaran algunas características básicas para dar una idea de las posibilidades de estas cámaras y la necesidad de relacionarlas con sistemas de navegación.
Las cámaras digitales permiten una mayor eficiencia en el proceso de producción de imágenes digitales pero por el momento es discutible si van, en poco tiempo, a reemplazar totalmente a la cámara fotogramétrica analógica. La razón es que la mejor resolución que se obtiene por ahora es de un píxel de aproximadamente unos 10 micrones.
Cámaras digitales de pequeño formato con proyección central.
Generalmente las cámaras son de un formato menor que las analógicas y están compuestas por una arquitectura de CCDs formando arrays de elementos sensores. La resolución del píxel puede alcanzar los 12 mm x 12 mm, obteniéndose una resolución total o tamaño de la imagen de salida de 7680 x 13824 píxeles con un sistema óptico de 120 mm para el modo Pancromático. Para el caso del modo Multiespectral estas cámaras cuentan con cuatro canales, tres para la composición color (RGB) y uno para el cercano infrarrojo (N-IR). La resolución radiométrica para las cámaras aéreas digitales mas avanzadas es de 12 bits por píxel, además cuentan con un gran poder de almacenamiento de bytes para poder registrar una gran cantidad de imágenes por cada una de las misiones, aproximadamente la cantidad de dato digital está por encima de los 800 Gb.
El problema del desplazamiento de la imagen de los puntos debido al movimiento del avión mientras se encuentra abierto el obturador en el proceso de registro de la imagen, se soluciona de una manera similar a las cámaras analógicas. Se utiliza un sistema FMC (forward motion compensation) consistente en un proceso electrónico de retardo o demora en el tiempo de integración de la imagen.
Características particulares de las cámaras digitales:
- En general tienen las mismas condiciones métricas que las de gran formato
- Permiten la utilización de aviones pequeños y ubicarla en lugares menos accesibles del avión debido a que se manejan por control remoto.
- Son mucho menos costosas.
- Necesitan más corridas para cubrir la misma superficie, pero los costos del vuelo son pequeños respecto al costo del producto final.
- Se presentan con distintas cabezas y sensores: una cabeza con sensor pancromático, una cabeza con sensor RGB, dos cabezas pancromáticas y dos cabezas RGB, equipadas con distintos filtros, también tienen la posibilidad de registrar energía electromagnética en el infrarrojo cercano.
- En este caso a estas cámaras es imprescindible agregarles un soporte giro estabilizado, dado el pequeño formato de la imagen el eje de la cámara debe estar absolutamente vertical siempre.
- Necesitan de un sistema de navegación y obturación por coordenadas asistida por GPS
- Es necesario la determinación de coordenadas de toma por GPS, puesto que el pequeño formato de la foto hace imposible utilizar apoyo terrestre.
Correspondencia de Imágenes
Cuando se utiliza la técnica de observación de imágenes digitales por pantalla de ordenador frecuentemente es necesario establecer una correspondencia de dos o más imágenes raster, sobre todo para el caso de fotogrametría digital. Por ejemplo para el caso de las Orientación Interna, la imagen de una marca fiducial se corresponde con un modelo bidimensional de la marca. Para el caso de la Orientación Externa Relativa y Absoluta partes de una imagen se hacen corresponder con partes de otra imagen para conseguir la formación de un Modelo estereoscópico de aptitud métrica. Otros casos muy frecuentes son la generación de modelos digitales del terreno (DTM) o cuando tratamos el tema de interpretación automática de imágenes donde partes de una imagen se hacen corresponder con modelos de objetos para identificar y por otra parte situar los objetos de la escena bajo análisis. Generalmente esta traslación de espacios imágenes 3D sobre conjuntos 2D produce una cierta perdida de información y en muchos casos cuando las imágenes son muy complejas esta correspondencia resulta muy difícil.
Estereocorrelacion Automática
Para determinar las coordenadas de un punto de una foto aérea basta con encontrar su homologo en la otra foto del par estereoscópico. Cuando un operador de restitución realiza la búsqueda e identificación de puntos homólogos sobre el modelo estereoscópico lo hace en forma mentalmente automática pero precisamente esta tarea que puede llegar a ser muy repetitiva generalmente insume la mayor parte del tiempo de restitución, consecuentemente si se espera obtener un mayor rendimiento en los tiempos de restitución, esta operación debería lograrse automatizar.
Para comenzar a analizar este tema, hay que comenzar primero por considerar los algoritmos de correlación automática. Estos algoritmos realizan la comparación de una pequeña ventana de píxeles correspondiente a los alrededores de un punto considerado en la imagen izquierda con las distintas ventanas posibles del punto homologo de la imagen derecha. Esta comparación es bidimensional para el caso de la posición de los píxeles dentro de la matriz imagen y también puede considerarse como tridimensional si consideramos como un atributo espacial a la respuesta radiometrica del píxel (nivel de gris). Aquí se plantea un problema de calculo bastante importante ya que el numero de operaciones requeridas para encontrar un determinado píxel de una imagen de referencia en su imagen conjugada puede ser muy grande, además cuando las imágenes digitales no han pasado por un buen proceso de ajuste radiometrito previo se presenta mucha incertidumbre en la determinación del píxel homologo puesto que pude haber muchos píxeles con las características del píxel de referencia.
Los algoritmos de calculo tratan de hallar una solución única y para ello utilizan una técnica que consiste no en comparar niveles de gris de un píxel particular sino en tomar matrices de píxeles lo mas cercanas a la solución final (matrices pequeñas N x N), y comparar con ecuaciones como las de convolución discreta bidimensional. Luego cuando los niveles de gris de cada píxel de la matriz comparados con los niveles de gris de la otra matriz de la imagen conjugada son iguales hemos logrado la correspondencia buscada. Esto es desde el punto de vista teórico matemático que surge como la necesidad de los algoritmos de calculo pero en la practica la situación se presenta mas compleja debido a que las imágenes aparte del “ruido” propio del proceso digital también se ven afectadas por los factores de los cambios de perspectiva que hacen que un mismo objeto sobre la superficie del terreno tenga una respuesta radiometrica diferente, por otra parte siempre están las distorsiones geométricas debido al relieve del terreno.
Imagen Fotográfica y sus Productos
Generalmente a la restitución usual de un Modelo le sigue un proceso cartográfico que da como resultado la obtención de una Carta Topográfica convencional, las dificultades que presentan estas cartas obtenidas con esta metodología de trabajo está en la actualización. Los productos digitales permiten realizar una actualización continua no siendo necesario volver a efectuar una restitución. Por otra parte la posibilidad de manejar la información directamente en capas (Layers), facilita mucho la carga de datos en Sistemas de Información Geográficos (GIS), agilizando de esta manera la toma de decisiones que en el campo de los accidentes ambientales por ejemplo puede ser crucial.

Proceso de Construcción de Cartografía Digital
El proceso de construcción de una cartografía mediante procedimientos digitales no varia mucho de los mecanismos altamente probados y eficaces de la cartografía tradicional.
Luego del control de la calidad del vuelo fotogramétrico en cuanto a su calidad geométrica, se procede a enviar la información a la división de geodesia que es la encargada de los apoyos de campo. Esta división luego entrega monografías de coordenadas para pasar a la división aerotriangulación. Posteriormente se realiza la restitución y luego diversas pruebas con el objeto de detectar errores:
- Test de Corrupciones: busca errores e impide que los errores se propaguen
- Test de Estructura: analiza la estructura general de la restitución
- Test de Conectividad: analiza la conectividad de las curvas de nivel, que no se corten entre si. Capas de conectividad:
Orografía 3D
Hidrografía 3D
Construcciones 3D
Energía 3D
Limites 3D
Usos del suelo 3D
Los Test de conectividad se realizan en la misma hoja cartográfica y entre las hojas adyacentes.
Las Cartas Topográficas de Línea contienen información planialtimétrica de gran precisión, es la cartografía básica para la realización de estudios esenciales. El Instituto Geográfico Militar de la Republica Argentina (IGM) publica Cartas Topográficas a escalas 1:500000, 1:250000, 1:100000 y 1:50000.
SW